Aleatoriedade controlada evita congestionamento em enxames de robôs, revela estudo de Harvard
Em ambientes muito cheios, aumentar o número de robôs nem sempre acelera as tarefas; pelo contrário, pode causar bloqueios que paralisam todo o sistema. Pesquisadores da Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) descobriram que uma pequena alteração no padrão de movimentação dos robôs — a introdução de um grau controlado de aleatoriedade — pode evitar esses congestionamentos e melhorar significativamente a eficiência dos enxames robóticos.
O desafio dos enxames robóticos em espaços limitados
Imagine um grupo de robôs encarregados de tarefas urgentes, como limpar um derramamento de óleo ou montar máquinas complexas. Inicialmente, adicionar mais robôs acelera o processo. Porém, ao ultrapassar um certo limite de densidade, o espaço passa a ficar congestionado, os robôs começam a atrapalhar uns aos outros e o progresso desacelera.
Esse fenômeno levanta uma questão crucial: qual é o número ideal de robôs que podem atuar simultaneamente em um espaço restrito para manter a máxima eficiência?
Metodologia: da simulação ao laboratório
Para investigar essa questão, a equipe liderada pelo professor L. Mahadevan combinou modelagem matemática, simulações computacionais e experimentos com robôs reais. A pesquisadora Ph.D. Lucy Liu conduziu o estudo com orientação do pesquisador sênior Justin Werfel.
Nos modelos computacionais, cada robô (ou agente) começava em posições aleatórias e recebia destinos aleatórios, simulando uma atribuição contínua de tarefas. A movimentação dos agentes podia variar entre trajetórias totalmente lineares (sem ruído) e trajetórias altamente erráticas (com ruído elevado). A introdução desse "ruído" representava uma pequena variação aleatória no percurso dos robôs.
Resultados: o equilíbrio entre ordem e caos
Os experimentos mostraram que:
- Sem ruído, os robôs seguiam linhas retas e rapidamente formavam aglomerações densas, causando engarrafamentos que paralisavam o sistema.
- Com ruído excessivo, os robôs evitavam congestionamentos, mas a eficiência caía devido ao movimento disperso e errático.
- Entre esses extremos, existia uma "zona ideal" de ruído. Nesse ponto, os robôs formavam aglomerações temporárias, mas conseguiam se desviar uns dos outros e continuar avançando, mantendo um fluxo constante e eficiente.
Essa descoberta ressalta como uma simples regra local de movimentação pode gerar comportamentos coletivos complexos e coordenados sem a necessidade de controle centralizado.
Validação prática com robôs físicos
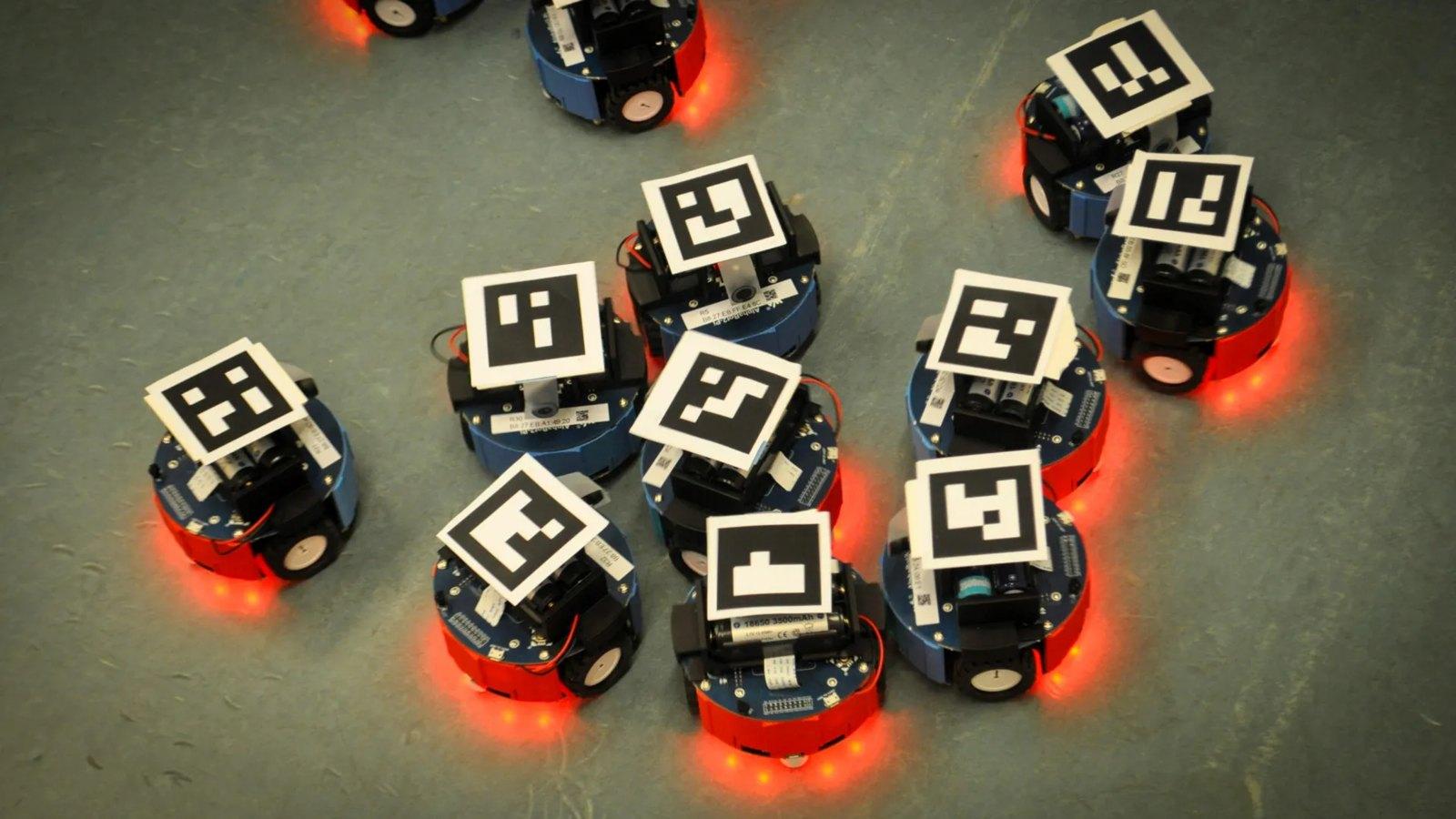
Para confirmar a validade dos modelos, Liu colaborou com o físico Federico Toschi, da Eindhoven University of Technology, na Holanda. Eles realizaram experimentos com pequenos robôs de rodas equipados com QR codes para rastreamento em laboratório. Apesar dos robôs físicos serem mais lentos e menos precisos que os agentes simulados, os padrões observados foram consistentes com as previsões computacionais.
Implicações para o mundo real e além da robótica
Além de otimizar enxames robóticos, os resultados podem influenciar o planejamento de ambientes humanos, como o gerenciamento de multidões, sistemas de trânsito e espaços públicos. A modelagem matemática desenvolvida permite prever a taxa de cumprimento de metas em função da densidade e do nível de aleatoriedade, oferecendo ferramentas para melhorar o fluxo em diversos contextos.
Segundo Mahadevan, compreender como grupos ativos — sejam formigas, animais ou robôs — se organizam e executam tarefas em ambientes lotados tem relevância para ecologia comportamental e engenharia.
Detalhes da publicação e financiamento
O estudo foi publicado na revista Proceedings of the National Academy of Sciences (PNAS) em 2026, sob o título "Noise-enabled goal attainment in crowded collectives". O trabalho recebeu apoio da National Science Foundation Graduate Research Fellowship Program, da Simons Foundation e do Henri Seydoux Fund.