Como a General Motors Treina IA para Direção Autônoma a 50.000× a Velocidade Real
A condução autônoma representa um dos maiores desafios da inteligência artificial aplicada ao mundo físico. A General Motors (GM) está na vanguarda dessa tecnologia, desenvolvendo uma abordagem escalável para treinar sistemas de direção autônoma a velocidades até 50.000 vezes superiores ao tempo real, combinando simulações em larga escala, aprendizado por reforço e modelos baseados em linguagem visual.
O desafio da "cauda longa" na condução autônoma
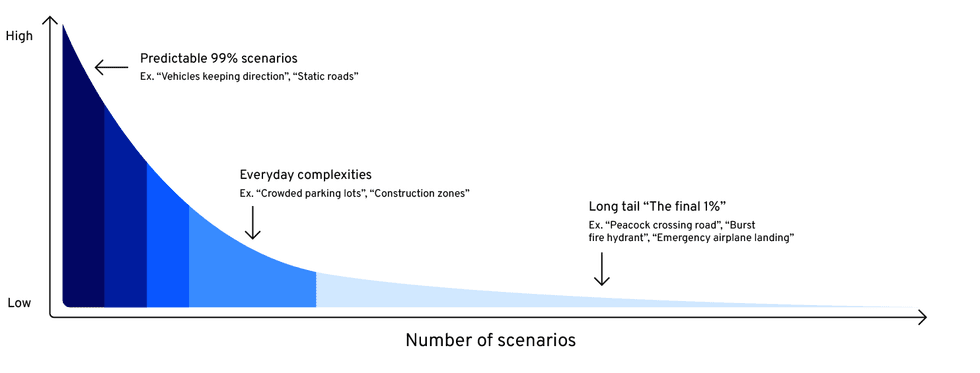
Na direção autônoma, a maior dificuldade está em lidar com eventos raros, ambíguos e inesperados — conhecidos como "cauda longa". Embora a maioria das situações no trânsito seja previsível, é justamente essa minoria de casos excepcionais que define se um sistema é seguro e confiável para uso em larga escala.
Exemplos incluem desde objetos inusitados na via, como um colchão caído, até situações extremas, como apagões que desativam semáforos, exigindo que veículos autônomos naveguem em condições nunca antes experimentadas. Além disso, desafios cotidianos que demandam senso comum, como ceder passagem em estacionamentos lotados ou interpretar gestos de trabalhadores em obras, também requerem soluções sofisticadas.
Modelos Vision Language Action (VLA) para percepção avançada
Para interpretar esses cenários complexos, a GM desenvolve modelos VLA, que partem de modelos padrão de visão e linguagem treinados com dados em escala da internet e são adaptados para tarefas específicas de direção. Esses modelos conseguem reconhecer objetos 3D e interpretar gestos humanos, como um policial sinalizando para que um veículo pare, mesmo diante de um semáforo vermelho.
Além disso, os VLAs geram rastros de raciocínio que auxiliam engenheiros e operadores de segurança a entenderem as decisões tomadas pelo sistema, facilitando a validação e o diagnóstico.
Dual Frequency VLA: equilibrando raciocínio e reação rápida
A direção segura exige decisões em frações de segundo, o que torna o tempo de resposta um fator crítico. A GM desenvolveu o "Dual Frequency VLA", que combina um modelo maior e mais lento para decisões semânticas complexas com um modelo menor e eficiente para controles imediatos, como direção e frenagem. Essa arquitetura híbrida permite raciocínio profundo sem comprometer a agilidade necessária para a segurança.
Simulações em alta fidelidade para testar cenários perigosos
Para preparar os veículos para situações raras e perigosas, a GM realiza milhões de simulações diárias, equivalentes a dezenas de milhares de dias de direção humana, comprimidos em poucas horas. Essas simulações permitem reproduzir eventos reais, modificar dados do mundo real para criar novas variantes e até projetar cenários inteiramente novos, testando o sistema em condições que seriam inviáveis ou perigosas no ambiente real.
Gerando dados sintéticos para casos extremos
A GM utiliza tecnologias de IA para criar dados de treinamento que representam situações extremas, mantendo a coerência com a realidade. A pesquisa "Seed-to-Seed Translation" usa modelos de difusão para transformar cenas reais, por exemplo, convertendo um dia claro em uma noite chuvosa ou com neblina, preservando a geometria da cena.
Além disso, o simulador baseado em difusão "GM World" permite a criação de cenários completamente novos a partir de linguagem natural e caixas delimitadoras espaciais, possibilitando a inclusão de elementos desafiadores, como veículos que cortam a trajetória do carro autônomo.
Aprendizado por reforço acelerado em ambientes abstratos
Para ensinar tomada de decisão e planejamento tático, a GM desenvolveu o "GM Gym", um simulador proprietário que combina sensores de alta fidelidade com o ambiente abstrato "Boxworld". Este último foca nas dinâmicas espaciais e regras de trânsito, dispensando detalhes visuais complexos, o que permite treinar modelos de aprendizado por reforço a velocidades 50.000 vezes superiores ao tempo real, simulando 1.000 km de direção por segundo de GPU.
Esse método permite não apenas imitar motoristas humanos, mas desenvolver políticas de direção com resultados objetivos verificáveis, como segurança e progresso no trânsito.
Transferindo conhecimento do virtual para o mundo real
Para aplicar o aprendizado obtido em ambientes abstratos ao mundo real, a GM utiliza a técnica chamada "On Policy Distillation". Nessa abordagem, o modelo treinado em Boxworld atua como professor para um modelo que será implantado nos veículos, acelerando a transferência de conhecimento. Em apenas 30 minutos de distilação, o modelo real pode assimilar o equivalente a 12 horas de aprendizado bruto, herdando os instintos de segurança desenvolvidos na simulação.
Testando falhas antes que aconteçam com SHIFT3D
Além de treinar o sistema para dirigir bem, a GM usa o pipeline diferenciável "SHIFT3D" para criar objetos adversariais que desafiam a percepção do veículo. Por exemplo, um carro comum pode ser sutilmente modificado para se tornar mais difícil de detectar. Essa estratégia ajuda a identificar riscos de segurança antes que eles ocorram nas ruas, reduzindo em mais de 30% colisões por quase-acidentes em casos extremos.
Gerenciando a incerteza para maior segurança
Um sistema robusto precisa reconhecer quando está diante de situações desconhecidas. Para isso, a GM adiciona uma "Epistemic uncertainty head" aos seus modelos, que diferencia ruídos comuns de confusão genuína. Quando o sistema detecta alta incerteza epistemológica, ele sinaliza para que engenheiros analisem e incluam esses exemplos difíceis no conjunto de treinamento, aprimorando continuamente a segurança.
Desafios e futuro da condução autônoma na GM
A abordagem da GM para resolver o desafio da cauda longa envolve um ecossistema integrado, que combina simulações de alta fidelidade, ambientes abstratos, aprendizado por reforço e raciocínio semântico. Ainda há questões em aberto, como o equilíbrio entre dados simulados ilimitados e dados reais mais ricos, o desenvolvimento de políticas de direção mais humanas e a criação de cenários novos e críticos para segurança.
A GM está investindo na construção das ferramentas, infraestrutura e cultura de pesquisa necessárias para avançar a condução autônoma em escala real, com veículos, clientes e condições de estrada do mundo real.
Links úteis
Leia também
Nvidia lança RTX Spark: a potência da IA Blackwell chega aos PCs Windows
6 de junho de 2026
Por que ainda não medimos os efeitos da IA sobre os seres humanos?
2 de junho de 2026Google DeepMind apresenta Gemini Omni e Gemini 3.5 com 11 demonstrações inovadoras em vídeo
29 de maio de 2026