Robôs com inteligência física: a revolução da startup Eka em manipulação autônoma

Em Cambridge, Massachusetts, a startup Eka está desenvolvendo robôs com uma destreza física que impressiona especialistas e lembra o impacto inicial do ChatGPT na inteligência artificial linguística. Com braços robóticos que conseguem realizar tarefas complexas, como parafusar lâmpadas ou organizar nuggets de frango, a empresa aposta em um avanço significativo na inteligência física dos robôs, capaz de transformar diversos setores.
Robôs que aprendem sozinhos: o diferencial da Eka
Ao contrário de projetos anteriores, como o Dactyl da OpenAI, que dependia de simulações virtuais limitadas e dados humanos para treinar robôs, a Eka desenvolve seus robôs a partir de milhares de horas de treinamento em ambientes simulados, onde eles criam suas próprias estratégias para manipular objetos. Essa abordagem, chamada de vision-force-action model, combina percepção visual, força tátil e ação física, permitindo que os robôs aprendam a lidar com a física real dos objetos — peso, inércia, textura — de forma muito mais natural e adaptativa.
Exemplos práticos da habilidade dos robôs Eka
- Parafusar lâmpadas: O robô ajusta sua pinça para segurar a lâmpada com delicadeza, corrige a posição quando a lâmpada escorrega e a parafusa com precisão, iluminando a área de trabalho.
- Organizar nuggets de frango: Em uma esteira com caixas plásticas, o robô pega os nuggets espalhados na mesa, improvisando entre pegar cuidadosamente ou lançá-los para dentro das caixas em movimento, demonstrando rapidez e adaptação.
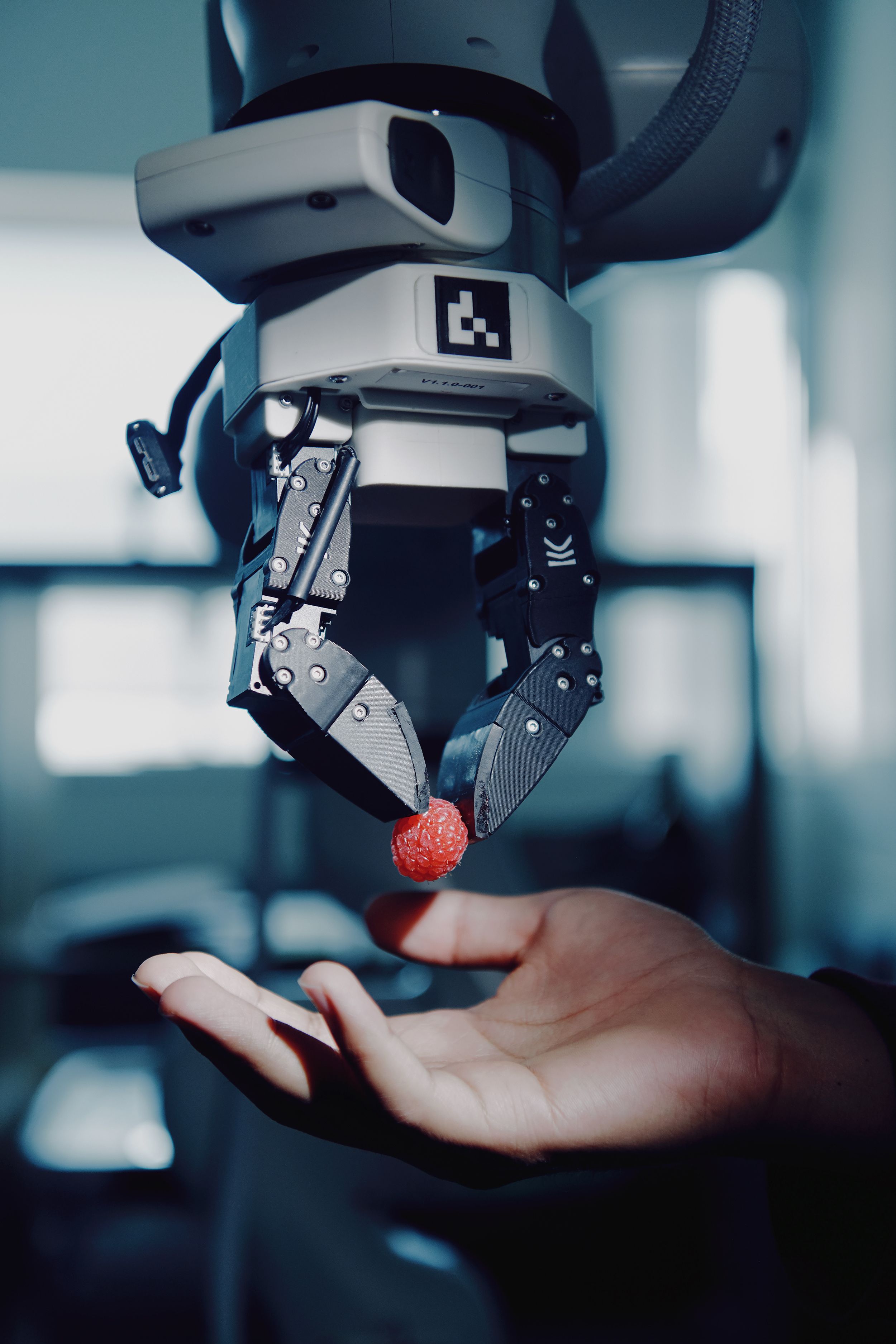
- Manipulação de objetos variados: Chaves, escovas de cabelo, caixas de protetores auriculares — o robô identifica, toca levemente e segura objetos de diferentes formas e texturas com fluidez.
Contexto e desafios da inteligência física em robótica
Desde os anos 1980, como apontou o cientista Hans Moravec, a inteligência física — a capacidade de manipular o mundo real com as mãos — é um desafio maior para máquinas do que tarefas cognitivas abstratas. Projetos anteriores, como o Dactyl, demonstraram avanços, mas ainda tinham limitações severas, como a incapacidade de recuperar objetos que começavam a escapar da pinça ou manipular objetos diferentes do cubo de Rubik sensorizado.
A Eka acredita que a solução para esse problema está na simulação mais realista e no aprendizado autônomo dos robôs, que não dependem exclusivamente de dados humanos. Seus fundadores, Pulkit Agrawal e Tuomas Haarnoja, apostam que a escala e a qualidade dessa simulação podem levar a uma inteligência física super-humana.

Implicações práticas para indústria e comércio
Se confirmada, a tecnologia da Eka pode revolucionar a automação em ambientes que exigem delicadeza e adaptabilidade, como fábricas, armazéns, restaurantes e até residências. Áreas como o manuseio de alimentos, que ainda dependem muito da mão de obra humana, podem ganhar robôs que lidam com objetos únicos e irregulares com rapidez e cuidado.
O futuro da robótica: entre humanos e máquinas
Apesar dos avanços, os fundadores da Eka reconhecem que o caminho para a destreza fina, como a necessária para montar dispositivos complexos, ainda depende do desenvolvimento de atuadores e sensores específicos, além de muita prática em simulações. Eles também evitam revelar detalhes técnicos, mantendo sua abordagem como vantagem competitiva.
Enquanto isso, o convívio entre humanos e robôs em ambientes como restaurantes ainda parece ser valorizado. Como observou o jornalista ao visitar o local, a interação humana tem um valor que a automação ainda não substitui completamente — pelo menos por enquanto.